|
Задана структурная схема автоматической системы управления ЛА
в режиме стабилизации и управления углом тангажа (рис. 1). Передаточные функции
блоков схемы:
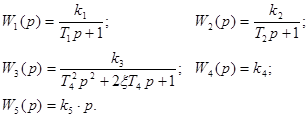
Определить передаточную функцию корректирующего звена Wk3(р) так, чтобы система «ЛА-САУ»
обладала следующими свойствами и показателями качества:
· астатизмом I-го порядка;
· передаточным коэффициентом
разомкнутой системы k = 10с-1;
· перерегулированием σmax% ≤ 30%;
· временем переходного процесса tp
≤ 2,5с.
Максимальное ускорение регулируемой величины должно быть не
более 10 рад/с2 при начальном рассогласовании Δθ
= 0,1 рад.
Построить переходной процесс скорректированной системы и
показать, что система «ЛА-САУ» удовлетворяет заданным требованиям.
Вариант значения параметров системы «ЛА-САУ»:
Значения параметров системы:
 ; ;  ; ;  ; ;  ; ;  ; ;  ; ;  ; ; 
На основе полученного вида  синтезировать
корректирующее звено из синтезировать
корректирующее звено из  , ,  , ,  элементов. элементов.
|